-
研究とは、物事について深く考え、探求すること。その道を究めれば、より良い未来を築くための道筋が見えてくる。
帝京大学には、そんな未来への扉を開こうとする研究者たちがいる。

自動運転パーソナルモビリティで高齢者を支援することで社会課題の解決をめざす。
- 井上 秀明いのうえ ひであき
- 帝京大学理工学部機械・精密システム工学科 教授
1981年東京大学工学部産業機械工学科を卒業。日産自動車株式会社に入社し、総合研究所モビリティ・サービス研究所主管研究員として、車両運動性能、自動運転技術の研究に従事。2015年株式会社自研センターに入社し、車両の安全性の調査研究に従事。2020年4月より現職。主な研究テーマは地域内移動のための自動運転モビリティ。
日産自動車の研究者として最先端の自動運転技術開発に携わってきた経験を生かし、
帝京大学で「地域に喜ばれる自動運転モビリティ」を研究する井上秀明教授。
現在は、自動運転でありながら「なるべく乗らずに楽しく歩けるモビリティ」をめざしている。
一見すると相反するように見えるが、
そこには自動運転を熟知しているからこそ見えてきた社会課題への対応の考え方がある。
自動運転の普及によって
運動不足になってしまう懸念
近年の自動運転技術の進歩はめざましく、自動ブレーキや前を走る自動車との車間距離を維持して走行する運転支援機能、特定条件下での自動運転機能が実現してきている。2021年夏に開催された東京オリンピック・パラリンピックの選手村で自動運転バスがテスト走行を行ったことも記憶に新しい。
今後さらに自動運転が普及すれば、地方で生活する高齢者など「交通弱者」と呼ばれる人たちの移動手段となる。自動車がなければ移動が難しい地域でも外出しやすくなり、活動的になることも期待できる。しかし一方で、自動運転の方向性によっては負の効果をもたらす恐れがあると、理工学部機械・精密システム工学科の井上秀明教授は指摘する。
「高齢の方が自動運転に頼りすぎるあまり、歩く能力はあるのに自分で歩かなくなり、結果として足腰が弱ってしまうことを懸念しています。私の母は骨折してから足腰が弱り、それでも杖を使えばまだまだ歩ける状態だったのですが、歩行自体が苦痛となって外に出かけなくなりました。そして本当に歩けなくなってしまいました。自動運転は外出の機会を増やしてくれるかもしれません。しかし、歩行の機会までは増やしてくれません。むしろ歩行機会を減らしてしまうのではないかと懸念したのです」(井上教授)
井上教授は2020年4月に帝京大学教授に就任し、緑豊かな丘陵地帯にある宇都宮キャンパスで過ごすようになってから、交通弱者のためのモビリティや歩行をサポートする自動運転技術の必要性を感じるようになったという。


「キャンパスの近くにある“うつのみや文化の森”という広大な公園には、ブナ林の美しい散策路があります。高齢者にはこのような散策路を自分の足で歩いてもらいたい。緩やかな坂もありますが、そこでは車椅子がサポートするので自分で歩いてもらいたい。ここは、そんなことを実現するための研究の実証フィールドとして活用しています」(井上教授)
歩くことをサポートするための
歩行者に寄り添うパーソナルモビリティ
研究のターゲットは、交通弱者のための一人乗りの「パーソナルモビリティ」だ。高齢者向けパーソナルモビリティといえばカートのような乗り物や小型自動車が一般的だが、井上教授は「電動車椅子は最も手軽なパーソナルモビリティ」であるとして、市販されている電動車椅子を選んだ。この電動車椅子をベースに高齢者が乗りやすいよう制御するプログラム開発を進めている。
本来、電動車椅子は“乗り物”だが、井上教授の研究する電動車椅子は人を乗せるのではなく“一緒に歩く”ことを目的としている。背もたれに設置したハンドルに掴まれば坂道を上るときに引っ張ってくれるし、疲れたら車椅子に乗って自宅まで連れ帰ってもらうこともできる。
自動運転技術については、「歩行者と一緒に走行する」「後ろから付いて走行する」「ボタン一つで自宅に帰る」といった機能を想定している。車椅子にはレーザースキャナーとカメラを搭載しており、歩行者との距離を保ってペットのように後ろから付いて走行する。また、レーザーで周辺情報を読み取ってマップを生成するSLAM(Simultaneous Localization and Mapping)技術によって、屋内などの立体物がある空間であれば、初めての場所でも自分の位置を確認しながらスムーズに移動できる。


現時点での課題は、正面から人が歩いてきたり、進行方向に障害物があったりした場合に、電動車椅子が人や障害物を一度避けてから元の位置に戻ってくるように制御する仕組みだ。障害物を全て避けて歩行者に寄り添わせるには複雑な処理が必要となる。技術的にはSLAM技術とAIを応用することで解決できる問題だが、なるべく高価なセンサを必要とする手法は使いたくないという。
「この研究では、自宅周辺の買い物や通院、散歩など、決まったルートを走行することを想定しています。自動運転だからといって必ずしも完璧をめざす必要はなく、あえて自動化レベルを下げるなど、柔軟に対応すべきだと考えます」(井上教授)
歩行を生理学的・力学的に解析
安全なインタフェースを追求
井上教授は電動車椅子の自動化研究を進めつつ、歩行支援のメカニズムの解明にも取り組んでいる。その一つとして、帝京大学医療技術学部柔道整復学科の藤井宏明講師との共同研究がある。開発中の電動車椅子に人が引っ張られて歩くことで、どの程度の身体的負荷が軽減するかを生理学的観点から明らかにしようとしている。藤井講師の専門であるスポーツバイオメカニクスの領域では身体的負荷を心拍数で評価することが多いが、ここでも歩行支援の有無の差を心拍数変化で捉える研究を進めている。
また、床にセンサを埋め込んだ実験装置を利用し、歩くときの踏力を計測。電動車椅子で引っ張ったときと通常の歩行との違いを比較し、なぜ歩行負荷低減につながるのかを解明しようとしている。

さらに最近では、帝京大学理工学部機械・精密システム工学科で歩行ロボットを研究する池俣吉人准教授との共同研究も始めた。歩行の仕組みを研究する池俣准教授とともに、藤井講師との共同研究で得られた歩行データを活用しながら、電動車椅子のサポートを受けた歩行の数理モデルを作成し、歩行支援の力学的メカニズムの解明をめざしている。これにより、歩行者が掴まる持ち手の形状やアシスト方法の最適化、安全性の向上につながると考えている。


「人体の専門家、歩行の専門家との共同研究を通して、人間の歩行は“振り子運動”という極めて効率的な仕組みで行われていることを理解しました。歩行の専門家にとっては自明のことかもしれませんが、足が地面を後ろに蹴り出す力だけで前に進んでいると思っていた私にはとても新鮮な発見です。大学では、こうして真理を追究できる研究の面白さを日々感じています」(井上教授)
自動運転研究の最前線から
地域に喜ばれる研究へ
帝京大学の教員となる前、日産自動車の研究員として30年以上勤務してきた経歴を持つ井上教授。現在の自動ブレーキやACC(アクティブ・クルーズ・コントロール)研究など、自動運転技術の最前線で研究を続けてきた。当時を振り返ってもらうと、2013年に開催された「CEATEC JAPAN」が特に印象深いという。家電とITの展示会であるCEATECに自動車メーカーが出展しただけでも大きな話題となったが、この展示会場に電気自動車をベースとした自動運転車を出展し、会場内に設置されたコースで自動走行をしてみせたのだ。
「まだ自動運転の実現は難しいと思われていた頃です。ほかの自動車の接近を検知して停車し、発進、曲がる、駐車車両を避ける、標識に従って止まるといった機能が実現できることを世の中に示したインパクトは大きかったと思います」(井上教授)
そんな自動運転研究とともに歩んできた道筋を経て、今めざすのは、“地域の人びとに喜ばれる技術”だ。まずは宇都宮キャンパス周辺に住む高齢者の快適・安全・健康を守るパーソナルモビリティの実現に向けて研究を進めていく。


今後の展望については、「地域の高齢者施設などと連携した実証研究、福祉機器やパーソナルモビリティの参入を考えているスタートアップ企業との産学連携などに発展させていきたい」と話す井上教授。いずれは宇都宮キャンパスを交通弱者や高齢者の問題に取り組む拠点として、ここからパーソナルモビリティや自動運転技術の新たな価値を提案していく。




シリーズ
-
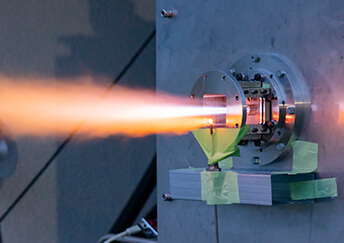
次世代液体ロケットエンジンに向け燃焼のメカニズムを解明する
-

地上から宇宙空間までヒトとカビが共に存在する領域全てを探究
-

東と西が交わるシルクロードの要所 アク・ベシム遺跡の文化遺産を調査
-

VRで人と人の出会いを再現し心、体、行動の関係を解き明かす
-
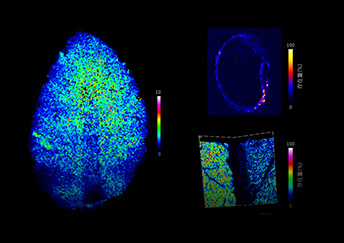
質量分析イメージングで食の安全や品質の向上に貢献
-
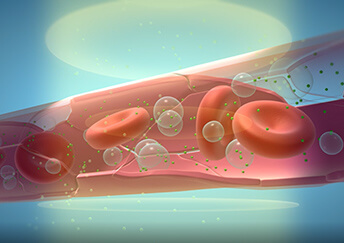
マイクロバブルと超音波により効果的で副作用の少ないDDSを開発
-
Danger signalと炎症の関係を解明して動脈硬化の新たな治療戦略に生かす
-

自動運転パーソナルモビリティで地域の人びとの健康に貢献する
-
経済学と哲学の交わる経済哲学で「福祉」のあり方を考える
-
新たな細胞療法を確立することで移植せずに血液がんを治す
-
脂質の代謝プロセスを調べて疾患との関係を明らかにする
-
近代日本の機密費を探査し現代社会の透明性のための示唆を得る
-

技術が蓄積された半導体をベースに工学的視点で量子コンピュータを開発
-
CTやMRIなどの医用画像からがん治療に役立つ情報を抽出
-

外科医が自ら起業し現場の課題に挑む 革新的技術開発で外科医療の未来を拓く