ロボット農機、いよいよ本格実用期に!
クボタが描くスマート農業の未来と現状
ロボットとAIで完全無人化
スマート農業のイメージを具体的にするために、クボタが描く、農業の未来像を見てみよう。同社が「クボタ・ミライ・アグリ・ビジョン」と名付ける稲作の究極の姿だ。この中では、ロボット農機やAIが活躍する夢のようなビジョンが示されている。
ビジョンは早春から始まる。夜明け前の里山だろうか。水を張る前の田んぼでロボットトラクターが土壌分析をしながら同時に耕している。前方には土の状態をリアルタイムで計測・分析するセンサー機能が装備され、後方に付けたアタッチメントで土を耕す。
晩春はロボット田植機の出番だ。水の張られた水田に、苗をロボットならではの正確な間隔で揃えながら植えていく。苗を植えると同時に肥料を施す。
夏。稲がぐんぐん生育していく。水管理は水位センサーと自動給排水システムの役割だ。水位や水温などは常に管理され、精密に制御される。クラウドサーバーは気象データを取り込み、天候の変動を予測して前もって対応する。
実りの秋。ロボットコンバインが、米の品種、食味や収量、水分量などを場所ごとに分析しながら収穫を進める。収穫した玄米は無人搬送車へと受け渡され、無人搬送車は品種や品質ごとに最適な乾燥倉庫へと収めていく。

ここで、ロボット農機の運転はすべて無人だ。作業の指示はクラウドサーバーから無線通信で伝えられる。人がやることと言えば、自宅やオフィスのPCと対話するだけ。市場や気象の変動を考えて「こうしたい」と意思を伝えればいい。AIがそれを汲みとり、ビッグデータの中から最適な作業工程を編み出してくれる。後は、時々刻々と変わる状況がロボット農機からクラウドへと送られ、その都度、工程が最適化されていく。
要素技術は出そろい、完成度も高い
では現状はどうだろうか。
現在のロボット農機もクラウドサービスも、この未来像に描かれた究極の稲作をすぐ実現できるわけではない。クボタの佐々木専務も「まだまだです」と笑う。しかし、その一方で、要素技術は製品が出始め、それぞれ着実に進化している。佐々木専務も「要素技術はかなり詰めて出来ている」と言い切る。
要素技術というのは、ロボット農機とクラウド型の営農支援サービスという2つの中核、さらに、育成状態の観測と施肥・投薬に使うドローン、水田の水管理を司る水位センサーや自動給排水システムなどだ。少なくとも稲作については、ほぼすべての要素技術が出そろい、完成度を上げている。しかも、その一部は既に実用期に入っているのだ。
レベル2に進化したロボットトラクター
これらの要素技術の中で特に重要なのがハードウェアの中核であるロボット農機と、ソフトウェアの中核となるクラウド型の営農支援サービスになる。まず前者のロボット農機から見ていこう。
クボタでは、ロボット農機について3段階のレベルに分けて進化させようとしている。いま製品化が相次いでいるロボットトラクターはそのうちの2段階目のレベル2に当たる。つまり、人が監視した状況下で無人自動運転ができるものになっている。
レベル1の農機は少し前から製品投入が始まっている。トラクターのみならず、田植機もコンバインもGPS機能では有人運転での自動操舵は当たり前のようにできる。これらの農機では人が乗った状態でハンドルから手を離しても、精度2、3センチで位置を制御できる。経験の浅い人が運転してもあたかも熟練の上級者のように動かせるのだ。一部の農機は、後付けでGPS機能付き自動操舵機にバージョンアップさせられる。
レベル2はここから一歩進んで、人が監視した状況で無人自動運転が可能になるという段階だ。複数台での連携協調作業もできる。最初に圃場内での位置決めをするだけで、後は農機から降りてリモコン一つで操作が可能になる。もちろん農機に搭乗しての運転もできる。昨年から今年にかけてトラクターはこのレベルに達した。田植機やコンバインはまだこのレベル2には至っていない。
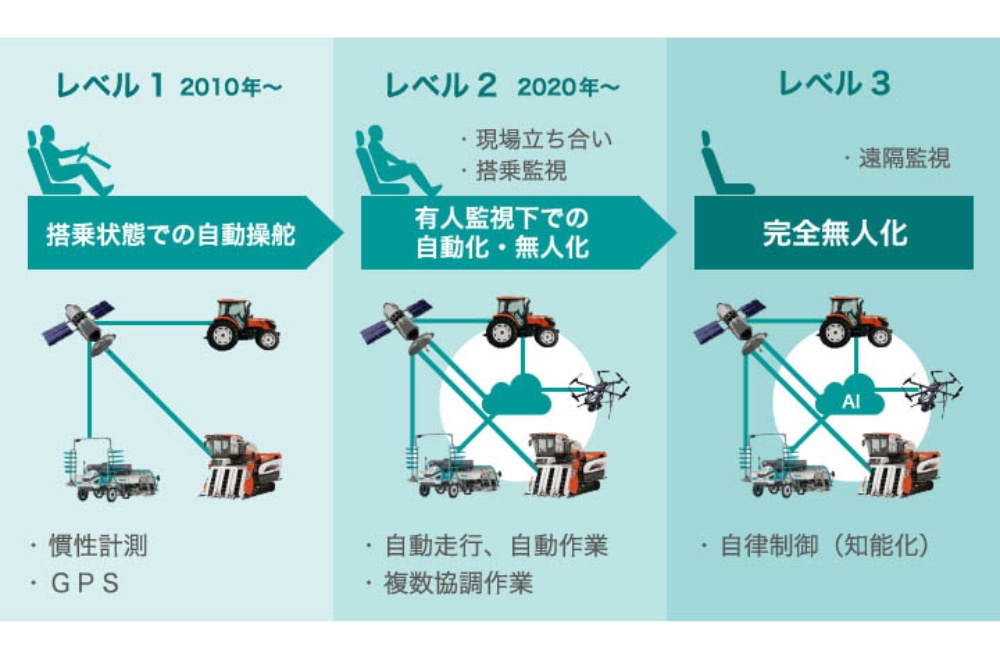
こうした開発の先にある最終目標がレベル3になる。「レベル3は遠隔監視を前提とした完全無人化です。そして、農道を走行可能なマルチロボットシステム。つまり農家から道路を走行して圃場へ自動で行き、無人で作業をするイメージ、いろいろなところと連携をしながら進めているところです」と佐々木専務。
課題はコストダウン
現在、レベル2のロボットトラクターが実用化され、一部の大規模農業法人などでの実証実験を進めながら使われ始めている。今後は、残っている課題がつぶされ、ブラッシュアップされていくだろう。同時並行で、その技術がコンバインや田植機などに波及し、同時にレベル3の開発が進む。
クボタが昨年からモニター販売を始めたレベル2の「アグリロボトラクタ SL60A」は現在9台が実稼働中だ。顧客へのモニター販売が5台。クボタ内で研究あるいは実証に使っているものが4台という状況にある。「シーン別にいろいろな場面を想定してはいるが、まだわれわれの経験値が足りないところがある。このアグリロボを使う中で今後も課題は出てきます。その都度改善をしながら開発を進めていく。また、現在のSL60Aは60馬力の製品ですが、もっと上の馬力帯への対応もしてほしいという要望もあります」と佐々木専務は語る。
実用期に入ったロボットトラクターの大きな問題は値段の高さだ。「人ひとり雇うと思えば安い」という声も挙がるが、現状でGPS基地局込みで1100万円ほどになる価格は一般の農家ではとても手が出せるものではない。
ロボットトラクターの開発を担当する西 啓四郎氏(農業機械総合事業部 農機技術本部 トラクタ技術第一部 第一開発室室長 E55プロジェクトチーム長)は、今後のコストダウンの方向について次のように説明する。

「安全の部分にかかっている赤外線センサーや超音波ソナーといった装置がかなり高価なものになっています。ISOの基準や、農林水産省のガイドラインに準拠した形でやっていますが、自動車の自動運転技術の分野では画像認識での対策が進んでいて数も出ていますので、その技術を取り入れればもっとコストダウンが見込めます。安全装置が安くなればお客様にはもっとお求めやすい価格になるのではないかと考えています。そのための研究開発を今進めているところです」
