ブリヂストン
協働ロボット時代に求められる能力とは?柔軟なハンドが「つかんで運ぶ」を実現
現場自動化の最大の難所を越える!
製造・物流の自動化が加速する一方で、「つかんで運ぶ」はなお現場最大の難所である。様々な形状やサイズの部品を安定して扱うことは難しく、多くの工程が人手に依存してきた。ブリヂストンのソフトロボットハンド「TETOTE」がその“柔軟性”で壁を越え、自動化の適用範囲を広げる。
産業用ロボットに対し
協働ロボットに求められる能力とは?

ブリヂストン
ソフトロボティクス ベンチャーズ CEO(最高経営責任者)
音山 哲一氏
ブリヂストンがなぜソフトロボティクス事業に取り組むことになったのか。工場において、従来の産業用ロボットは「早く」「力強く」「高精度に」という価値で加工などの作業で発展してきた。一方で、自動化できておらず人手が介在する複雑な作業があり、製造・物流・小売などの分野の特定作業に寄り添いながら、「人と協働する」ロボットの重要性が高まると同社の音山氏は指摘する。そこで重要になるのが、“様々なサイズ・形状の物を持ち運ぶ”という人間にとって当たり前の能力だという。
そのためにブリヂストンが提示する解が、ゴム人工筋肉を指として搭載したロボットハンド「TETOTE」である。この人工筋肉は、中のゴムチューブに空気を注入することでしなやかに曲がる。これにより、人の手に近い“いい感じにつかむ”を実装する。音山氏は、こうした柔らかいロボットが安心・安全という利点に加え、微小なズレや接触を許容できる点を強調した。
柔軟な把持で多品種対応
人とロボットの共生支える
続いて講演では、TETOTEの具体例として実際に現場で採用されている自動車工場での事例が動画を交えて紹介された。重量物対応モデルであるTETOTE ストロングモデル-12は加工工程で大型部品を投入する作業などに使われ、10kg超のエンジンケースをパレットから持ち上げ、指定の場所にセットするシステムを紹介。音山氏は、「従来の金属ハンドと金属部品の組み合わせでは、少しでも接触すると過負荷でロボット動作が止まることがあるのに対し、TETOTEの指が空気ばねのように働くことで衝撃を吸収しスピーディーかつ安定稼働に寄与します」と説明する。
中型のTETOTE ストロングモデル-6は、長尺で扱いにくい樹脂部品の射出成形機からの取り出し・棚入れなどに適用される。さらに、他にも「従来、2人程度かかっていた作業の部品搬送をロボットが担うことで、人はより難しい組み付け作業に集中できる」という役割分担が示された。
また組立前段取りのキッティング工程では、「棚から仕切り箱を引き出して多品種部品を正確に取り出し、定位置に置く」ところまでを行う作業を紹介。ラベルや保護カバーの取り外し、置き姿勢を変えるための器用な作業までを含めて自動化している。
治具をフレキシブルに置き換えながら多品種に適応する運用では、柔軟な把持が有効であることを強調した。音山氏は、こうした工程こそ「現場の知恵が集約された工程」だと述べる。最後に、TETOTEによる人とロボットの共生が「現場のモチベーション向上にもつながっていく」と説明した。
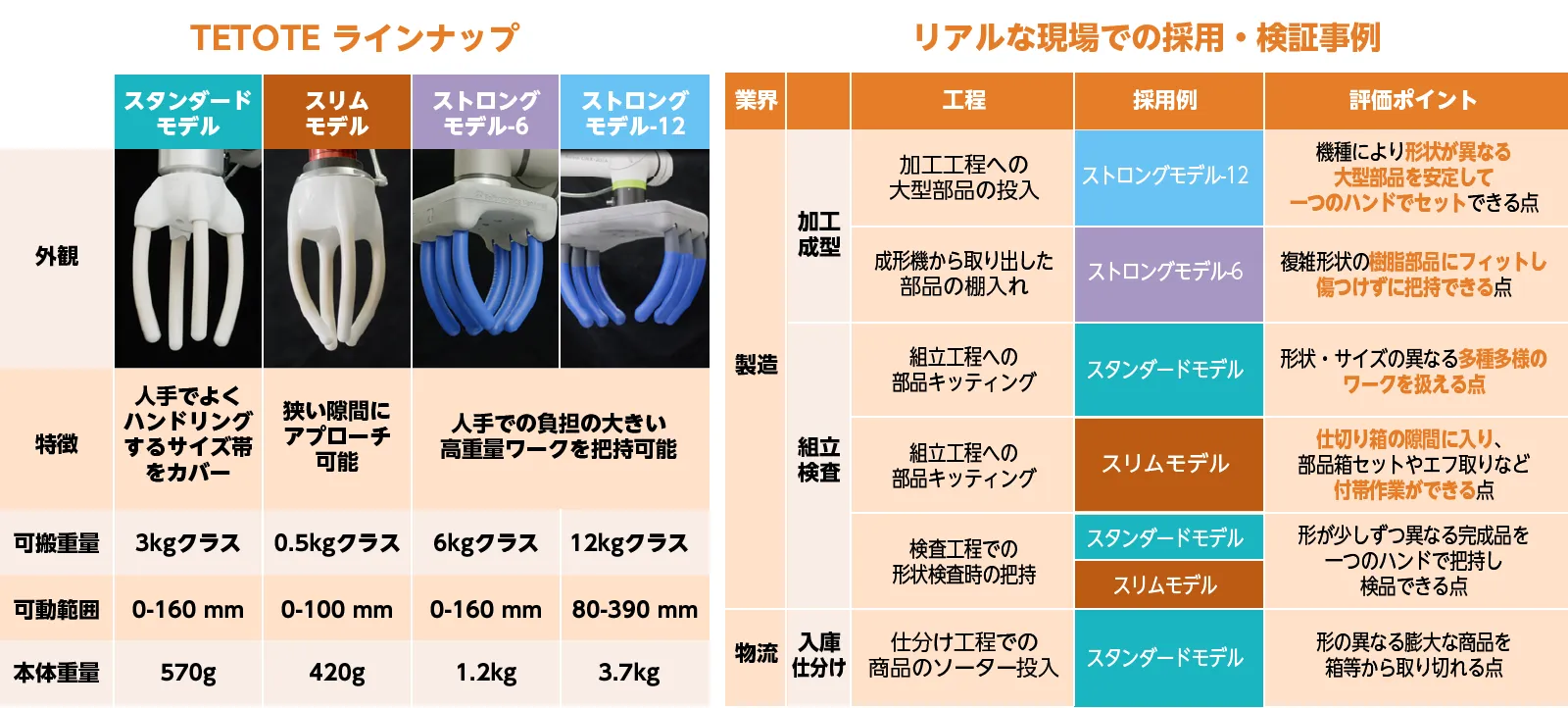
ソフトロボットハンド「TETOTE」のラインナップと採用・検証事例
人工筋肉を指として搭載したソフトロボットハンド「TETOTE」が様々な対象物の安定把持を実現。製造の多様な工程に適用されている
ブリヂストン ソフトロボティクス ベンチャーズ

Navigation
講演レビュー
-
NTTドコモビジネス
フィジカルAIとICT基盤が拓く次世代産業モデル
製造・物流の自動化を、新たな次元へ
NTTドコモビジネス×Mujinが描く未来NTTドコモビジネス
ビジネスソリューション本部 ソリューションサービス部・執行役員
山下 克典氏
Mujin
CEO 兼 共同創業者
滝野 一征氏
-
エイチシーエル・ジャパン
生産性向上とコスト削減をどう実現するか、
「AI Force」活用のポイントHCLTechが描くAI戦略
サービス変革とエンジニアリングの
融合がもたらす価値エイチシーエル・ジャパン
副社長 戦略ビジネス開発担当
藤井 大介氏
-
イノベーターズ・ブレイン
技術と市場ニーズを「対話型推論AI」でつなぐ
対話型推論AIが切り拓く次世代研究事業!
研究事業が激変するAI活用の核心イノベーターズ・ブレイン
代表取締役社長
伊藤 慎司氏
阪本薬品工業
研究所 所長
栗山 重平氏
-
ブリヂストン
協働ロボット時代に求められる能力とは?
柔軟なハンドが「つかんで運ぶ」を実現
現場自動化の最大の難所を越える!ブリヂストン
ソフトロボティクス ベンチャーズ CEO(最高経営責任者)
音山 哲一氏
-
NEC
「クライアントゼロ」の実践知で製造業DXを支援
NECのデータドリブン経営とは?
「クライアントゼロ」戦略による実践NEC
コーポレートIT・AIイノベーション部門
データ&アナリティクス統括部
ディレクター
川嶋 葵氏
NEC
製造ソリューション事業部門
スマートインダストリー統括部
ディレクター
宮脇 忠之氏
-
日本IBM
PoCの壁を打破、統合AI基盤が開く新境地
日本IBMと挑む「AIファースト」
エージェント型AIがもたらす変革日本IBM
テクノロジー事業本部 AI Lab Office
ビジネス・デベロップメント・エグゼクティブ
岡田 拓也氏
-
マイクロストラテジー・ジャパン
なぜ同じKPIなのに、組織内で数字がズレるのか
データを「意味」で統一
意思決定を遅らせる「数字のズレ」を断つマイクロストラテジー・ジャパン
アカウントエグゼクティブ 製造業担当
齋藤 陽太氏
-
アビームコンサルティング
グローバルトレンドから読み解く日本の構造的課題
「技術立国」から「統合立国」へ転換
日本の製造業が取るべき次の一手とはアビームコンサルティング
執行役員 プリンシパル
Head of Intelligence &
Research Institute
橘 知志氏
-
日本IBM(Apptio, an IBM Company)
Fortune 100企業の92社が取り組む「TBM」とは
ITの世界を“お金”に変換、価値を可視化
「共通言語」でIT・財務・ビジネスをつなぐ日本IBM
テクノロジー事業本部
Apptio事業部
アカウント エグゼクティブ
二宮 昂士郎氏
-
NTTドコモビジネス
NaaS(Network as a Service)活用の製品設計
製品出荷後も進化し続ける
新たな設計パラダイムNTTドコモビジネス
PS本部5G&IoT部 販売推進部門長
浅田 隆介氏
-
ドーモ
世界にまたがるグループの物流を俯瞰して管理
物流の不確実性にどう対抗するか
ヤマハが採るデータ物流戦略ドーモ
エバンジェリスト&グロース マーケティング マネージャー
後藤 祥子氏
ヤマハ
物流システム部 企画管理グループ
福井 真子氏
-
トムソン・ロイター
各国の規制に対応し正確で迅速な判断をサポート
AI活用で貿易業務を変革する
変化に強いデータ基盤のつくり方トムソン・ロイター
プロダクト・マーケティング本部 統括部長
森下 馨氏
-
Hacobu
“AI-Driven Logistics”の実現が企業競争力を高める
先進企業に学ぶ物流DXの要諦
今こそ、物流に「戦略」と「AI」をHacobu
取締役執行役員COO
坂田 優氏
-
日経BP 総合研究所
新局面を迎えた製造業DX、現在地と次のシナリオ
製造業DXは企業からエコシステムへ拡大
戦略の鍵は競争構造の変化とガバナンス日経BP 総合研究所
客員研究員
三好 敏
-
栗田工業
再現可能な構造へ“いい流れ”を、みずから生み出す
5年間で生産効率1.5倍の目標を達成
暗黙知を言語化しアルゴリズムに落とす栗田工業
デジタル戦略本部長
執行役員
前田 雄史氏
-
フジテック
小さく試して価値を見極め縦串重視で再定義
年間3万1000時間超の業務削減を実現
デジタルツインと生成AIで価値を最大化フジテック
専務執行役員
デジタルイノベーション本部長
友岡 賢二氏
※肩書は講演当時
-
CDO×CIO対談
コスモエネルギーGとロート製薬の実践
DXの壁を乗り越える!
変革の視座は異業界からコスモエネルギーホールディングス
常務執行役員 CDO
ルゾンカ 典子氏
ロート製薬
執行役員CIO
樋口 正也氏
-
藤本 隆宏氏
核心は「現場サイエンティスト」を生かせるか
日本の製造業は“中規模”が現在地
「DXのためのDX」に陥らず勝ち筋を描け早稲田大学研究院教授
東京大学名誉教授
ものづくり改善ネットワーク代表理事
藤本 隆宏氏
※肩書は講演当時
-
東京エレクトロンデバイス
SLMの活用で産業機器の提供価値はどう変わる?
AI PCの潮流は産業用分野に広がる
今こそアーリーアダプターとなれ東京エレクトロンデバイス
クラウドIoTカンパニー エッジクラウドソリューション部 部長代理
辻野 三郎氏