dSPACE Japan User Conference 2025講演レビュー



dSPACE Japan User Conference 2025講演レビュー

チューリング
取締役 COO
田中 大介氏
特別講演で登壇したのが、完全自動運転の実現を目指すチューリングの田中大介氏である。
チューリングは、「Ponanza」という2017年に将棋AIとして史上初めて名人との対局に勝利したソフトウエアの開発者である山本一成氏が、2021年に創業したベンチャー企業。同社の最大の特徴は、創業当初から自動車開発におけるE2E(エンド・ツー・エンド)の手法を追求してきたことだ。
自動運転システムは人間と同様に、「外界の認識」「状況の判断」「走行軌跡の決定」の3つのプロセスから構成される。従来の自動運転では、センサーからの情報を基に外界を認識するプロセスではAIを活用していたが、その後の「判断」や「走行軌跡の決定」のプロセスでは、人間のエンジニアが決めたルールに従っていた。これは、将棋ソフトウエアにおけるPonanza登場以前の世界に似ていると田中氏はいう。
Ponanzaでは、開発の早期段階から “AIにすべてを任せる”アプローチを採用し、史上初の栄冠を勝ち取ることができた。自動運転の領域でも同じことが起こるのではないか、というのがチューリングを創業して以来のアプローチである。それが、すべてのプロセスを単一のAIに任せるというE2Eの手法の原点だ。
田中氏によれば、業界におけるE2Eの理解が進んだのは2024年頃。欧米の先進的なメーカーが、E2E自動運転が実際に動くことを立証し始めたことで、一気にブレークしたという。
「国内企業では、E2Eの観点で試行錯誤を繰り返し、失敗した経験を積んだ企業は少ないのではないか」と田中氏はいう。チューリングは、完成車メーカーやTier1サプライヤーのAI開発を支援する「内製化支援」と、仕様の策定から協働でSDVを開発する「Turing Inside」モデルの2つの方向性でビジネスモデルを検討している。2026〜2027年には、海外の先進企業と同等のE2E自動運転を東京で実現し、2027年以降には量産車への技術提供を目指している。
さらに2030年以降には、レベル5の完全自動運転まで視野に入れており、実現には「基盤モデル」が必要だと田中氏は語る。同社が構築を目指す基盤モデルは、VLA(視覚・言語・行動)モデルと呼ばれる、画像を理解して言語で表現し、行動に移せる大規模モデルだ。
目的は、自動運転車に、現在見ている世界の意味を「解釈」する能力を与えること。単に「人間が上手く運転したときの視覚データ」を学習しただけのAIでは、稀なケースの非常事態に対応できないと断言し、完全自動運転の実現にはエッジケースに対応できる基盤AIモデルの開発が不可欠だと語った。

チューリングが目指す自動運転実現のロードマップ(資料:チューリング)

ウーブン・バイ・トヨタ
Production Tooling
Senior Engineer
前野 恵太氏
ウーブン・バイ・トヨタ(以下、WbyT)の前野 恵太氏は、dSPACEの事例紹介として登壇した。同社が取り組むのが、トヨタ自動車の次世代ADAS向けのHIL構築である。
WbyTはトヨタのソフトウエアプラットフォーム「Arene」の開発や、トヨタの実証実験の街トヨタ・ウーブン・シティ、AD/ADASの開発などを手掛ける。
2021年にトヨタ自動車が商品化した第3世代のADAS「Toyota Safety Sense(TSS)」の登場は、死傷者を伴う事故件数の減少に大きく貢献できた一方で、同社が掲げる「交通事故ゼロ」を追求していくためには、AD/ADASの作動範囲拡大が必要になっていると前野氏は話す。
このため次世代TSSの開発では、システムを評価する環境の高度化が必要になったという。第3世代のTSSまでは、カメラとミリ波レーダーで物体を認識し、認識結果をカメラやレーダーで処理してADAS・ECUに送信していたが、次世代のTSSでは、カメラの生データをADAS・ECUに入力し、レーダーの認識結果と合わせて認識から判断・操作まですべてのプロセスをADAS・ECUが担う。
また、第3世代のTSSの開発では、システムの性能を評価するのにスクリーンなどに映した外界の映像を実カメラで撮影し、カメラで処理したデータをADAS・ECUに送って動作を確認していた。しかしこの手法では、撮影した画像の歪みや、光軸の調整や維持に工数がかかるなどの課題を抱えていた。また投影する映像はdSPACEの「MotionDesk」で生成していたが、次世代のTSSではカメラの解像度が向上したため解像度が足りないという課題もあった。
そこで同社は、次世代TSSの開発にdSPACEのセンサー評価用データ生成ツール「AURELION」と、同ツールで生成した画像をECUに入力するためのインタフェースユニット「ESI(Environment Sensor Interface)」を採用。3台のパソコンでAURELIONを動作させて生成した映像をESIに送り、ESIからADAS ECUにカメラを模した映像信号を送り、車両の残りのデバイスのデータはdSPACEのHILである「SCALEXIO」からECUに入力するという、ADAS評価用のHILを構築した。ESIは複数のカメラ信号の出力が可能で、今回のHILではフロントカメラ1台と周囲監視カメラ4台の合計5台分の信号をESIに送信している。
「新開発のADAS評価用HILによって、映像の解像度が増し、従来よりも遠くから信号機の色を識別できるようになった他、映像信号のばらつきも減少した」と前野氏。夜間の歩行者を認識しづらいようなシーンなどにも活用しているという。
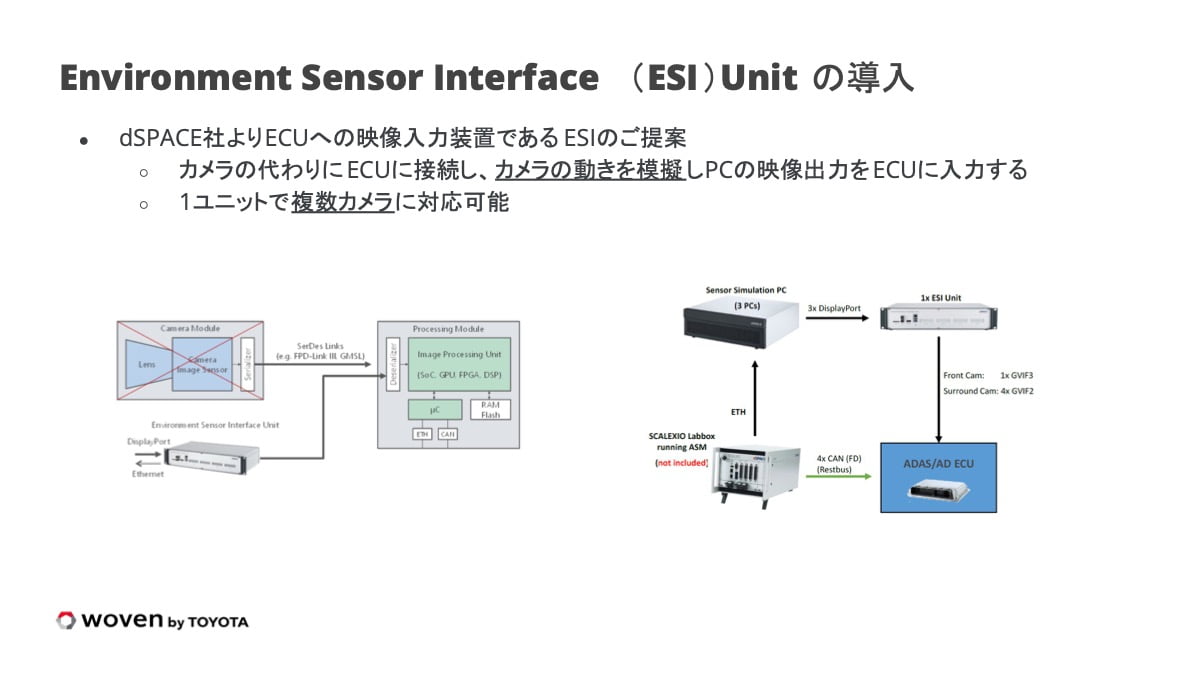
ウーブン・バイ・トヨタが次世代ADAS開発のために構築したADAS用評価HIL(資料:ウーブン・バイ・トヨタ)