自動運転の高度化に“データドリブン開発”が必須な理由(応用編)
どうすれば自動運転は安全と言えるか
シミュレーションでしか担えない責務
「応用編」では、いよいよ前回の「技術編」で生成したシナリオを用いた「シミュレーションテスト」を紹介していく。データドリブン開発における最新動向や、どこまでテストすれば安全と言えるのか、さらにdSPACEが新たに投入した新サービスなどを交えてdSPACE山本光氏に解説してもらった。

自動運転の高度化に“データドリブン開発”が必須な理由(応用編)
「応用編」では、いよいよ前回の「技術編」で生成したシナリオを用いた「シミュレーションテスト」を紹介していく。データドリブン開発における最新動向や、どこまでテストすれば安全と言えるのか、さらにdSPACEが新たに投入した新サービスなどを交えてdSPACE山本光氏に解説してもらった。

dSPACE Japan
ソリューション技術部 グループリーダー
山本光氏
データドリブン開発の重要性について紹介してきた本シリーズも今回が最終回。実際の道路環境で収集したデータを基にシナリオ生成サービスで作成した「テストシナリオ」に基づく、シミュレーションテストを見ていく。
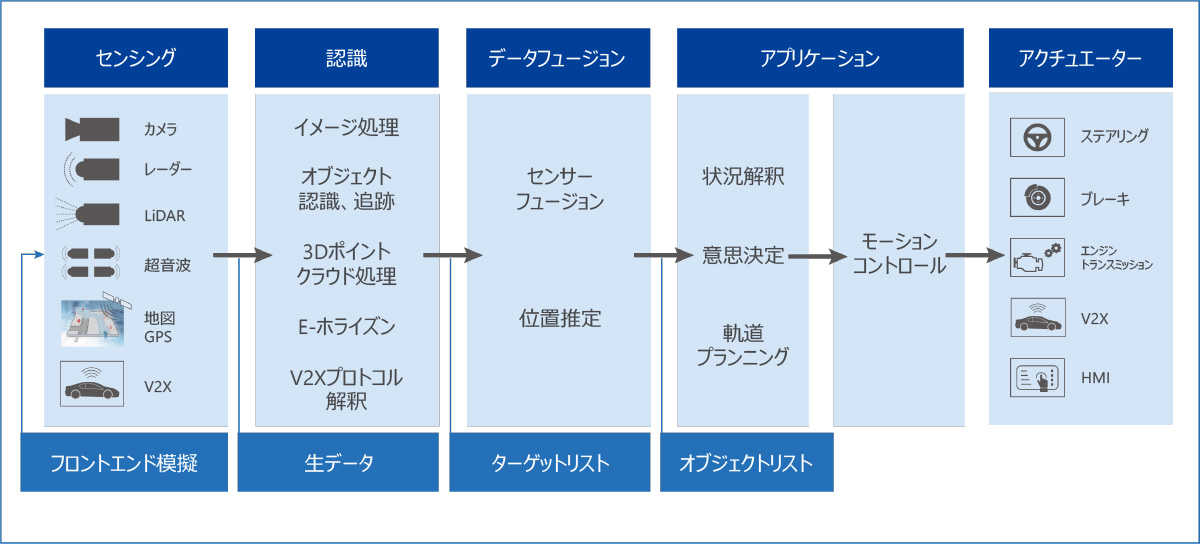
自動運転システムでは、各種センサーで外界の情報を収集する。カメラの画像データをイメージ処理したり、LiDARやレーダーの情報を認識したりすることで物体を認識する。そして各センサーが認識した情報をフュージョン(統合)し、自動運転アプリケーションで状況を解釈。車両の動かし方を意思決定し、運行する軌道の計画(プランニング)などを実行する。そして、その軌道を走るようにステアリングやブレーキ、エンジン、変速機などのアクチュエーターを動作させて車両の運動を制御する。「シミュレーションテストでは、これらの各段階のECUが正しい動作をするかどうかを検証することができます」(山本氏)。
ASMによる車両・走行環境シミュレーション
ここで使用するシミュレーションツールが、車両および走行環境をシミュレーションする「ASM(Automotive Simulation Models)」である。ASMには、エンジンや電動モーター、車両、交通環境、道路、センサーなどのモデルが含まれる。ASMをプラントモデル(制御対象)として、ユーザーのコントローラーモデル(制御器)をソフトウエアECUまたはバーチャルECUとして、「VEOS」と呼ばれるMIL(Model in the Loop)/SIL(Software in the Loop)向けのシミュレーション・プラットフォーム上でシミュレーションを実行する。またコントローラーモデルが実機のECUとなった場合には「SCALEXIO」と呼ばれるHIL(Hardware in the Loop)向けのシミュレーション・プラットフォーム上でシミュレーションを実行する。
ASMを用いたセンサーシミュレーションでは、車両に搭載したカメラから外界の画像がどのように取り込まれるか、LiDARから発射されたレーザー光が物体で跳ね返ってどのような点群データを作り出すかといった、センサーからの出力をシミュレーションした信号が作り出される。これらのセンサー信号を、開発中の画像処理ソフトウエアや点群データ処理ソフトウエアに取り込めば、正しく信号処理(物体認識)されるかどうかをテストできる。
さらに信号処理(物体認識)された結果を開発中の自動運転ソフトウエアに取り込み、正しく状況判断・意思決定・軌道プランニングが実行されるかをテストすることもできる。
「自動運転ソフトウエアの信頼性確認には、様々な走行シーンを組み合わせて1000万km以上のテストが必要だと言われています。しかしこれだけのテストを実際の道路を使って実施することは、天候や道路の混雑状況による制約、テストドライバーやテスト車両、開発期間の制約などからほぼ不可能です。もちろん、最終的には実際の道路を使った走行テストが必要ですが、シミュレーション段階で自動運転ソフトウエアの完成度を高めておけば、実際の道路を使ったテストは大幅に絞り込むことができます。現代の自動運転システム開発では、シミュレーションの活用が不可欠と言えるでしょう」(山本氏)