自動運転システムの開発に
必要なデータと活用方法

dSPACE Japan
ソリューション技術部 グループリーダー
山本光氏
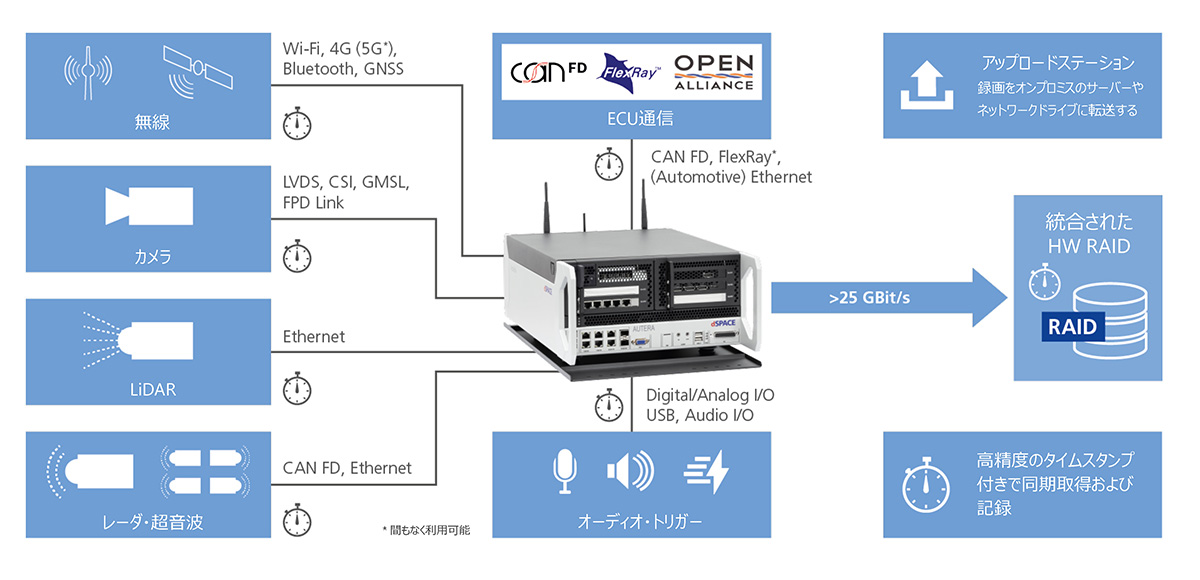
データドリブン開発の出発点になるのが、公道で試験車両を走らせて各種のデータを収集する「データ収集」だ。試験車両に搭載した複数のカメラ、ミリ波レーダー、LiDAR、超音波センサーといった各種センサーから出力されるデータが収集対象となる。
これらのデータの活用方法は、主に2つの種類がある。1つは、収集されたデータをそのまま自動運転ソフトウエアに入力し、認識アルゴリズム、センサフュージョンおよびモーションコントロールの妥当性確認やテスト向けに活用することだ。このテストは、公道で走行して収集したデータをそのまま再現するため「データリプレイ」と呼ばれる。そしてもう1つが、収集したデータを、多様なシナリオを作成する基データとして使うことだ。これは後で説明するように「シナリオ生成サービス」により実現できる。
これに応じて「dSPACEでは効率的なデータ収集・データ管理のために、1つのハードウエア製品と、2つのソフトウエア製品を用意しています」と山本氏は語る。走行中のデータを収集する専用データロガー「AUTERA」、データ収集のためのソフトウエア「RTMaps」、それに収集したデータを管理するソフトウエア「IVS(Intempora Validation Suite)」だ。

左:IVS (ADAS/自動運転向けクラウドベースの検証ツールチェーン)、 右上:RTMaps(リアルタイムマルチセンサアプリケーション)、右下:AUTERA(車載データロガー)
大量のデータを高速で収集する
可搬性に優れたデータロガー
試験車両には多数のセンサーが搭載され、収集するデータは膨大な量になる。これをリアルタイムで記録できるデータロガーがAUTERAだ。「大量のデータを高速で収集できる車載専用のデータロガーであり、最大32TBという非常に大容量のデータストレージユニット(DSU)を最大2基搭載することができます。またデータロギングの帯域幅も1つのDSU当たり25Gbit/sと非常に広いので、複数のカメラからの入力のような非常に帯域幅の広いデータもリアルタイムで収集できます」(山本氏)。
また、米Intel社の12コアの「Xeon」プロセッサーと32GBのRAMを備えるほか、米NVIDIA社のGPUを搭載したボードを追加することもできる。これにより、カメラが収集した画像データの処理や物体認識、LiDARが収集した点群データの処理などが可能だ。加えて、自動運転のアルゴリズムを組み込むことで、これらのデータを基にした位置推定、車両が置かれている状況の推定、ブレーキをかけるかステアリングを切るかといった意思決定、さらにはどのような軌道を走行するかのプランニングまでもAUTERA単体でこなすことができる。
このため「AUTERAを試験車両に搭載すれば、単に走行中のセンサーデータを収集するだけでなく、開発途中の自動運転ソフトウエアを実装することで実車による走行試験を実施することもできます」と山本氏は話す。従来、公道試験車両によるデータ収集にはデスクトップPCなどが用いられていたが「振動や温度変化に弱く、仕様やOSバージョンが同じPCをそろえることが難しい場合もありました」(山本氏)。AUTERAは車載用に開発することで、振動や温度変化に強く、可搬性に優れ、しかも多彩な入出力端子や、豊富な拡張性を備えているのが特長だ。