デブリの捕獲ミッションを
地上でシミュレーションする

JAXA
研究開発部門
第三研究ユニット研究開発員
水野 光氏
—お二人は現在、どのような業務に取り組んでいますか。
水野私は現在、モデルベース開発やシミュレーションの開発に携わっています。シミュレーションをメインで研究しつつ、各プロジェクトをサポートする立場です。このシミュレーター開発においても、リアルタイム・シミュレーションの開発・実装を支援する立場で参加しました。
池田私も研究でプロジェクトを支援するという立場は水野と同じです。JAXAが進める「商業デブリ除去実証(Commercial Removal of Debris Demonstration: CRD2)」プログラムにも参加しています。デブリを除去するためのロボット部分の研究開発を担当する他、「軌道上サービス技術実証プラットフォーム(SATDyn)」の研究開発や、宇宙ロボット向けオープンソフトウェアプラットフォームであるSpace ROSの研究開発にも携わっています。
JAXA
研究開発部門
第一研究ユニット研究開発員
池田 勇輝氏
—CRD2プログラムとはどのようなものでしょうか。
池田我々は、スペースデブリ除去プログラムを起点に新しい宇宙事業を開拓し、日本企業が新たな市場を獲得することを目指しています。大型スペースデブリを除去する技術の実証に当たっては、実際に宇宙空間に宇宙機を飛ばしてデブリを除去する前に、地上で試験やシミュレーションによって確実に動作するかどうかを確認することが大切になってきます。そのため、軌道上サービス技術実証プラットフォームであるSATDynの研究開発を進めています。
—SATDynは、スペースデブリ除去に限らず、将来的に軌道上で提供する各種サービスの実証プラットフォームだと伺っています。
水野軌道上での提供が想定されるサービスは、衛星の軌道の変更や装置の交換、燃料の補給、電力の充電など様々です。こうした技術に共通するのは、宇宙空間の対象に正確に近づく技術です。スペースデブリの捕獲では、軌道上を高速で移動するデブリに数千km離れたところから近づく必要があります。先行してこの緻密な技術を確立することで、他のアプリケーションにも応用できるわけです。
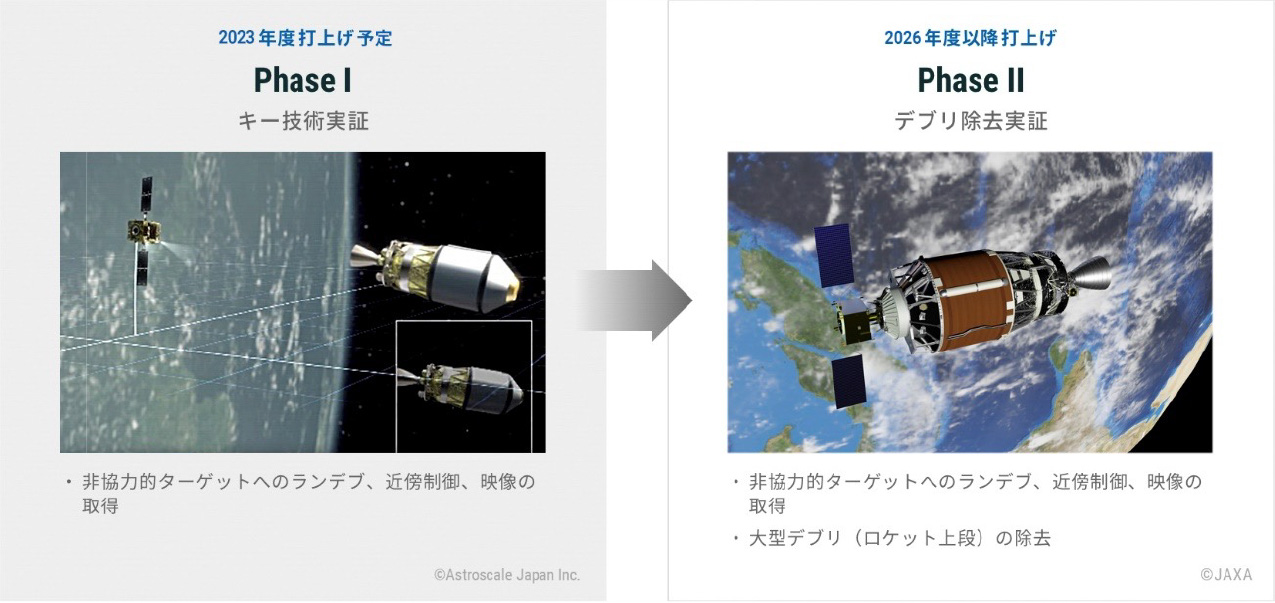
デブリの捕獲は
2つのフェーズで実施
池田宇宙空間でデブリに近づいて捕獲するのがなぜ難しいか。スペースデブリは、それ自身が軌道決定・姿勢制御能力および捕獲されるためのインターフェース等を有していないため 「非協力的ターゲット」と呼ばれ、捕獲が非常に難しい物体です。例えば国際宇宙ステーションと補給船のドッキングでは、双方が位置を制御しながら近づきドッキングします。これが「協力的物体」です。
対してデブリは姿勢制御もなければ、どのように回転しているかも分かりません。どこをつかんでいいかも分からない。かなり不確定要素が多いのです。しかも、対象デブリは約100分で地球を1周するような猛烈なスピードで宇宙空間を飛翔しています。CRD2プログラムで捕獲・除去を目指しているデブリは、ロケット上段そのもので、大型バスくらいの大きさになります。そうした物体に近づき、つかむというのは、これまでの宇宙開発には存在しなかった技術です。このような技術を地上で実証するための装置がSATDynです。
—お話を伺うと、相当難しい技術ですね。
池田そうですね。ですから、CRD2プログラムでは技術実証を2つのフェーズに分けて行っています。フェーズIは、実際にデブリの現物に近づいて、軌道上に長期間存在するロケット上段デブリの状態とその運動を観測するというもの。既に軌道上でデブリとのランデブーや、デブリとの距離約50mからの定点観測、周回観測に成功しています。
そして、次のフェーズIIが、フェーズⅠで観測したデブリを実際に捕獲し、除去するミッションになります。対象デブリをロボットアームでつかんで、その高度を下げ、混雑軌道から外す技術の実証を行うことを検討しています。
このデブリへの接近と捕獲する作業を、SATDynを使った実機シミュレーションで実証しています。デブリの姿勢や回転の様子、形状などは地球上からの観測は難しいので、近づいてみないと分かりません。フェーズIでデブリの状態を確認することで、フェーズIIで確実なデブリ除去を行うことを目指しているわけです。