自動運転の高度化に“データドリブン開発”が必須な理由(技術編)

自動運転の高度化に“データドリブン開発”が必須な理由(技術編)
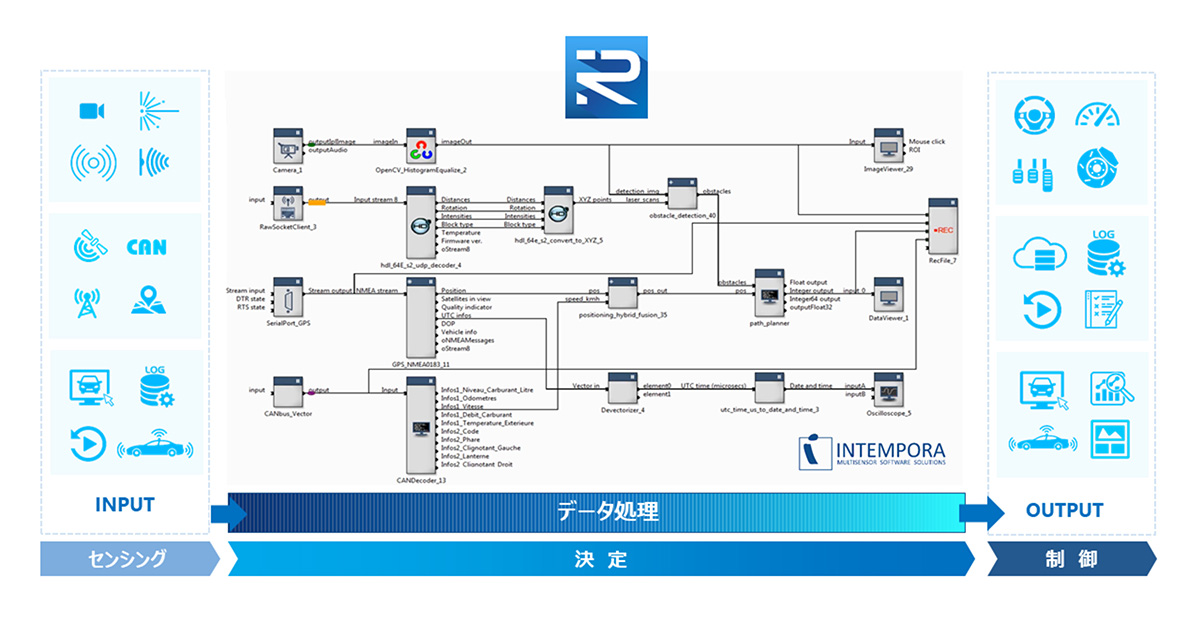
このAUTERAでデータを収集するためのシステムを簡単に構成できるソフトウエアが「RTMaps」だ。「例えば、カメラで画像データを収集し、収集中のデータのRGB画像や画像のエッジ(輪郭)だけを取り出した画像を記録したい場合には、RTMaps上で、カメラ入力やRGB画像処理、エッジ検出、レコーディングなどの機能ブロックを線でつないでブロック線図を描くだけで、データ処理のアルゴリズムを簡単に構成することができます」(山本氏)。同じ要領で、先に紹介したような自動運転のための認識アルゴリズムや判断アルゴリズム、あるいは軌道プランニングなどの機能ブロックもユーザーが作成し、ブロック線図に組み込むことが可能だ。さらにAUTERAとRTMapsを使って収集したデータは、異なるセンサーのデータにも共通のタイムスタンプが記録されているため、センサー間でデータの同期を取ることもできる。
RTMaps:ブロック線図で表記できるマルチセンサアプリケーション
こうしてAUTERAやRTMapsを活用して収集したデータを、クラウド上で管理するためのソフトウエアが「IVS」である。「多くのエンジニアが、試験車両で収集した大量のデータの中から、その都度に使いたいデータをどのように取り出すかで苦労しています。例えば収集したデータの中から、天候が雨の場合のデータだけを取り出したい、昼間に走行している場合のデータを抽出したいといったときに、担当者の“勘”に頼る場合もありました」(山本氏)。
これに対して、データの収集中に「歩行者」「道路標識」「高速道路」「雨天」「追い越し」など走行状況に応じたタグをデータに記録しておけば、クラウドに収容したデータの中からIVSを使って「高速道路上の緊急ブレーキ」「雨の中の横断歩道」「前方に車両がいる」「制限速度60mphの道を走っている」といった様々な条件で、取り出したいデータを絞り込むことが可能だ。
IVSによるデータサーチ

「こうしたタグデータは、タブレット端末などを使い、助手席の担当者が予め設定しておいたタグ情報を画面上でタップしていくだけで記録できます」(山本氏)。IVSは、dSPACEが用意するクラウド環境上で活用することを想定しており、AUTERAで収集したデータをクラウド上にアップロードしておけば、開発担当者はインターネットを通じてどこからでもアクセスできる。ただし情報の秘匿を重視する場合には、ユーザー企業が用意したプライベートクラウド上にIVSを組み込むこともできる。データのアップロードは、AUTERAからDSUを抜き取り、AUTERA用のアップロードステーションにDSUを挿入することで行うことが可能だ。
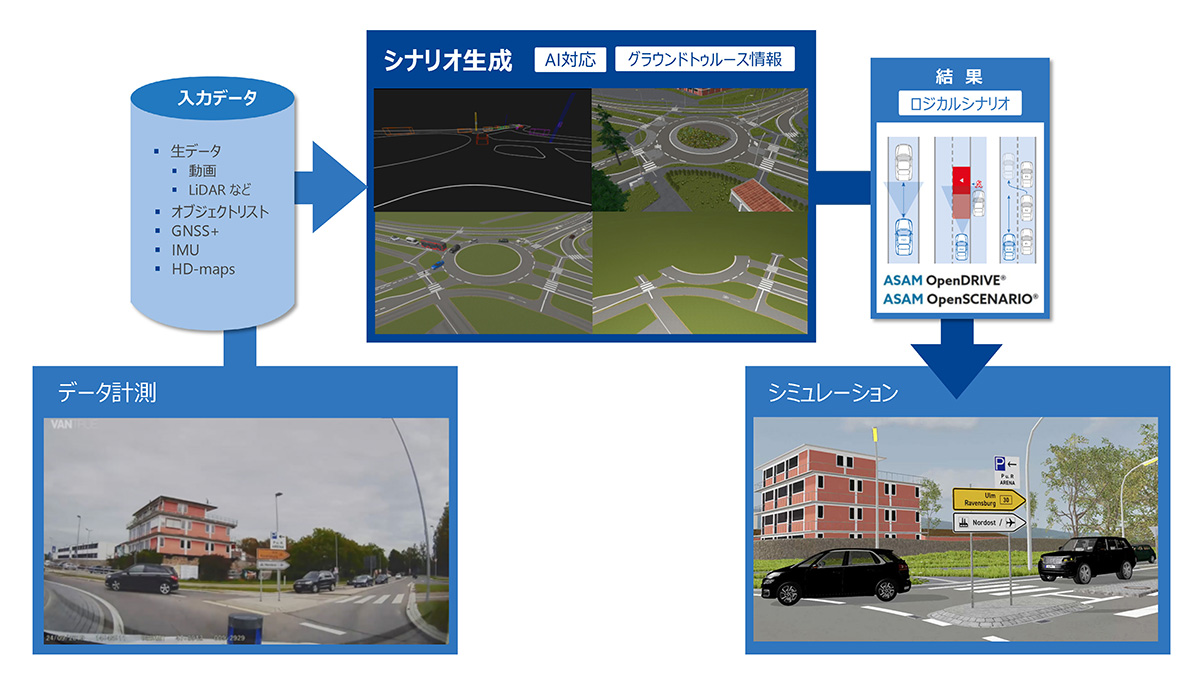
冒頭で説明したように、収集したデータをそのまま活用するのが「データリプレイ」である。しかし自動運転システムの試験では、自車両の速度、他車両との相対速度、道路の幅、歩行者や自転車の有無など様々な条件を変えながら多様なシナリオでテストをしたいというニーズが高い。こうした、考えられる様々な条件に応じて多様なパラメータを変化させることが可能なシミュレーション用のシナリオを作成する「シナリオ生成サービス」も提供している。
具体的には、ユーザーから提供されたLiDARの点群データ、およびカメラから取得した画像データを基に、周囲を走行する車両や自転車、歩行者、道路や建物の形状を3次元データ化し、走行環境をシミュレーション用のシナリオとしてデジタル的に再現する。「周辺を走行する車両や道路周囲の建物などは、あらかじめ用意された標準的な車両や建物の3Dモデルを使用して自動生成できますが、建物の形状などを実物に近づけたい場合は人手の作業も必要になってきます」(山本氏)。
現実世界の計測結果からシナリオを生成
このように、自動運転車に走行させたい道路環境をデジタル的に再現することで、自動運転ソフトウエアをシミュレーションテストするための環境が整う。ここで注意しなければならないのがデータの「匿名化」と「ラベリング」だ。カメラから取得したデータに歩行者が映っている場合、個人が特定されないように顔をぼかすなどの処理が必要だ。これが「匿名化(アノニマイゼーション)」である。
また、ここで言う「ラベリング(アノテーション)」はIVSによるタグ付けとは異なり、カメラ画像に映っている物体の中で「これは建物」「これは標識」「これは歩行者」などと分類する作業のことだ。「匿名化」や「ラベリング」はいずれもこれまでは人間が手作業で実施していた。しかしこの作業量は非常に膨大なものになる。dSPACEはこうした「匿名化」や「ラベリング」を自動化する技術を開発するベンチャー企業のunderstand.ai社を子会社化し、シナリオ作成の省力化を図っている。「この技術を活用することで、約85%のラベリング作業を自動化できています」と山本氏は話す。
次回の「応用編」では、このようにしてバーチャル空間の中に作成した走行環境を活用して、どのようなシミュレーションテストが実施できるのかを紹介したい。